






































































A Student-Driven, International Collaborative Science, Technology, Engineering, and Math Robotics Project
Nepal Robotics is an ambitious, globe-spanning, collaboration to achieve humanitarian objectives through technological innovations and applications appropriate to the unique circumstances of Nepal, yet potentially applicable to the circumstances of other nations. The Project, initiated in late 2013, is continuing.
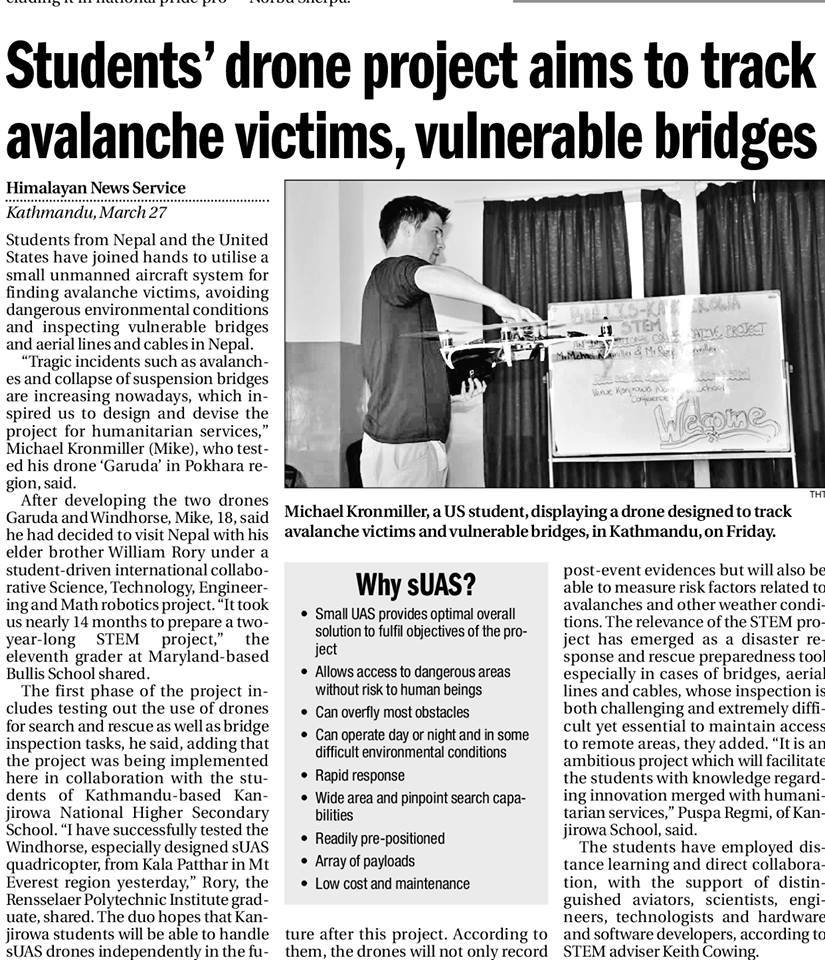
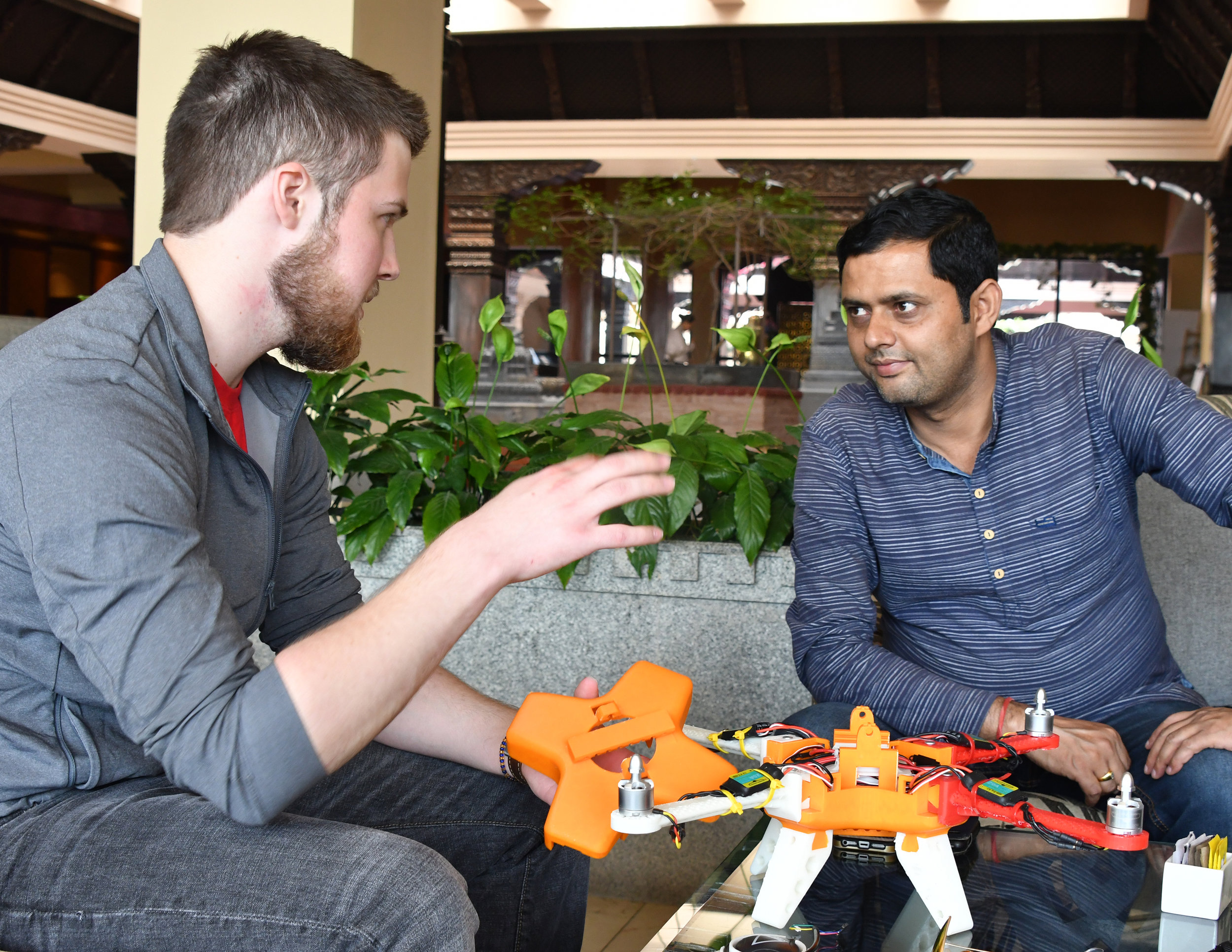
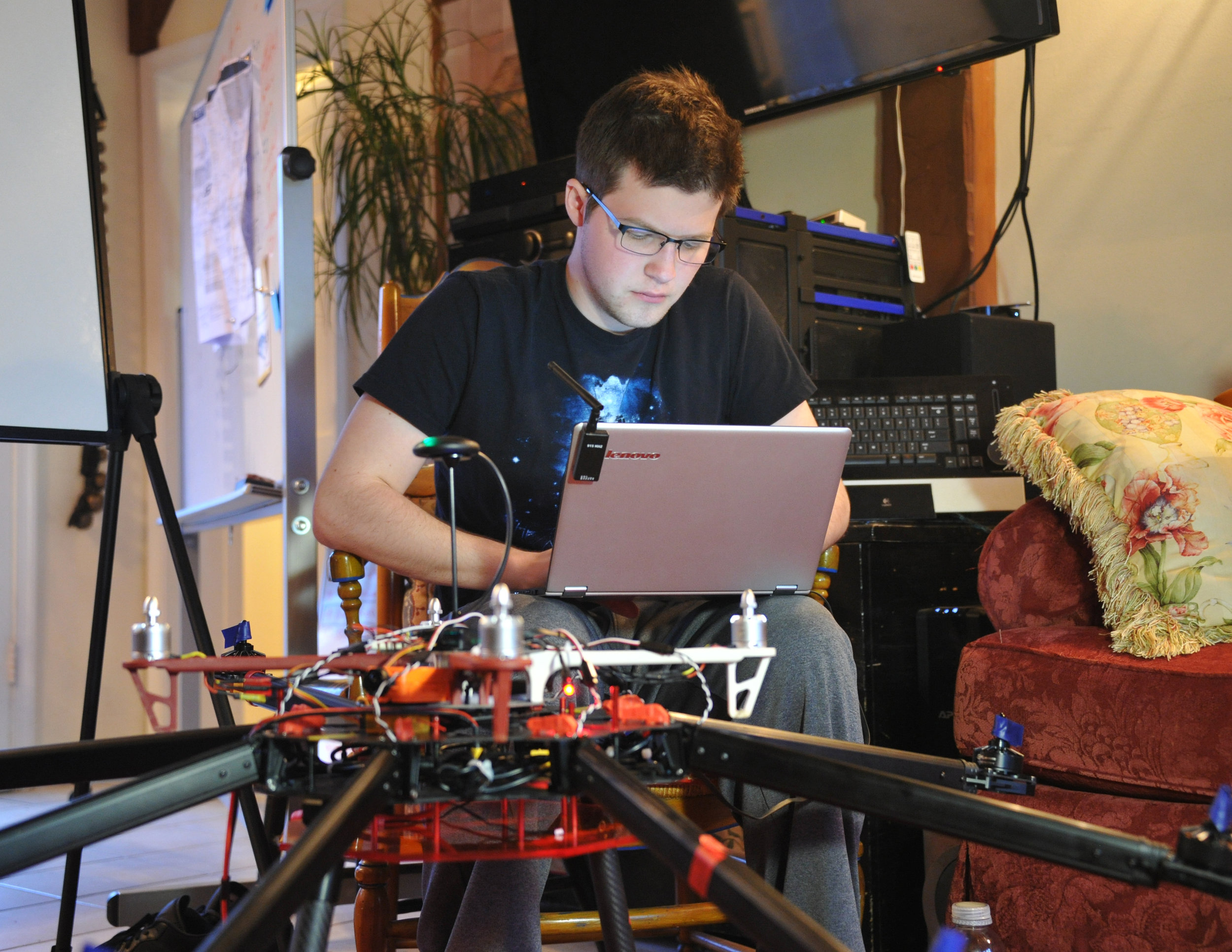
The ultimate goal of the Project is to design, manufacture, test, and evaluate sensor-equipped, small unmanned aircraft systems, “sUAS,” or “drones,” capable of locating disaster victims, supporting disaster avoidance, and inspecting vulnerable bridges and aerial lines and cables, in some of the most challenging conditions on earth. To meet this goal, students at two schools on opposite sides of the planet have joined forces, with the support of distinguished aviators, scientists, engineers, technologists, geologists, legal experts, and hardware and software developers.
Follow us on Twitter: @nepalrobotics





